Feasible and Aggressive Cornering Trajectories
Abstract
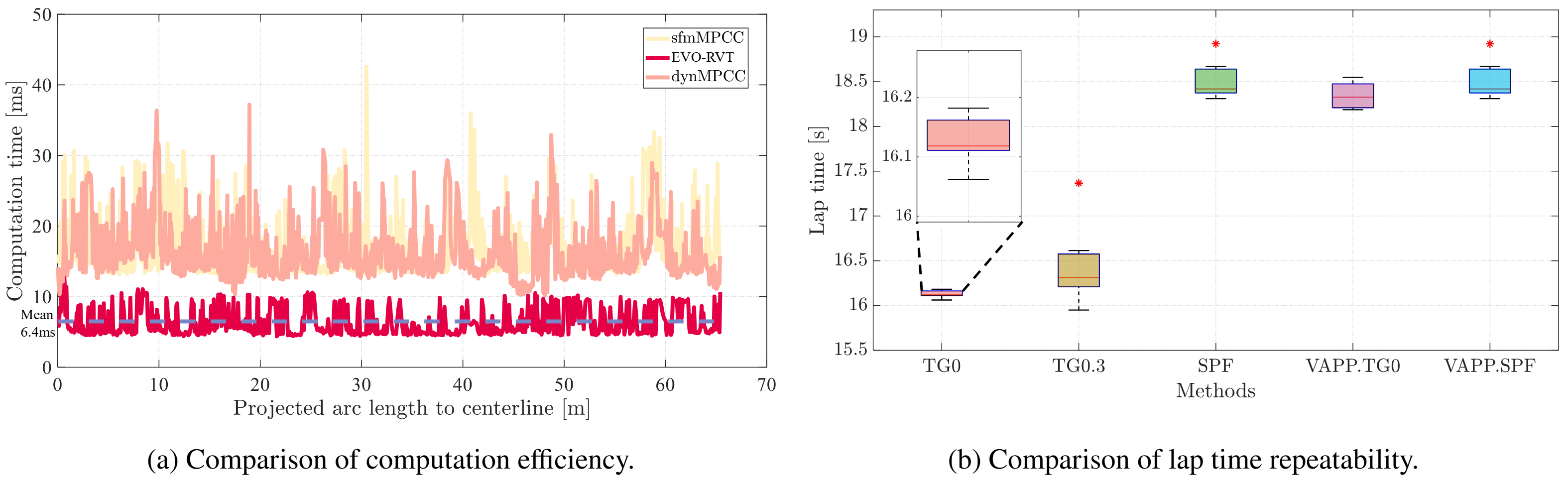
Model Predictive Contouring Control (MPCC) is widely adopted in autonomous racing for its effectiveness in modeling racing progress; however, existing versions struggle to balance path progress and cornering feasibility on racetracks with rapidly varying curvature and rely heavily on manual parameter tuning, which may lead to unsafe behaviors. To address these challenges, this paper proposes an Enhanced Velocity Optimization Model Predictive Contouring Control (EVO-MPCC) framework that explicitly incorporates a reference velocity profile (RVP) into the MPCC objective and employs Bayesian optimization for automatic parameter tuning. By performing continuous velocity optimization along the racetrack, EVO-MPCC enables feasible cornering and high-performance racing even under a limited prediction horizon. Based on the RVP, two complementary formulations are developed: EVO-RVT, which performs Reference Velocity Tracking (RVT) for high-performance racing in obstacle-free scenarios, and EVO-TVC, which introduces an RVP-based Terminal Velocity Cost (TVC) to enable flexible, collision-free, and time-efficient overtaking. Additionally, a lap-time minimization (LTM) objective is formulated for Bayesian optimization to tune high-performance planner parameters automatically. The proposed framework is validated on the RoboRacer platform through extensive simulation and real-world experiments. Results show that EVO-TVC achieves a 9.81% relative lap-time advantage over hierarchical overtaking approaches. At the same time, EVO-RVT reaches 98.23% of the reference projected velocity with a mean computation time of 6.41 ms, demonstrating consistent high-speed performance over multiple consecutive laps, and a 50.42% improvement in energy efficiency relative to offline-planned trajectories.
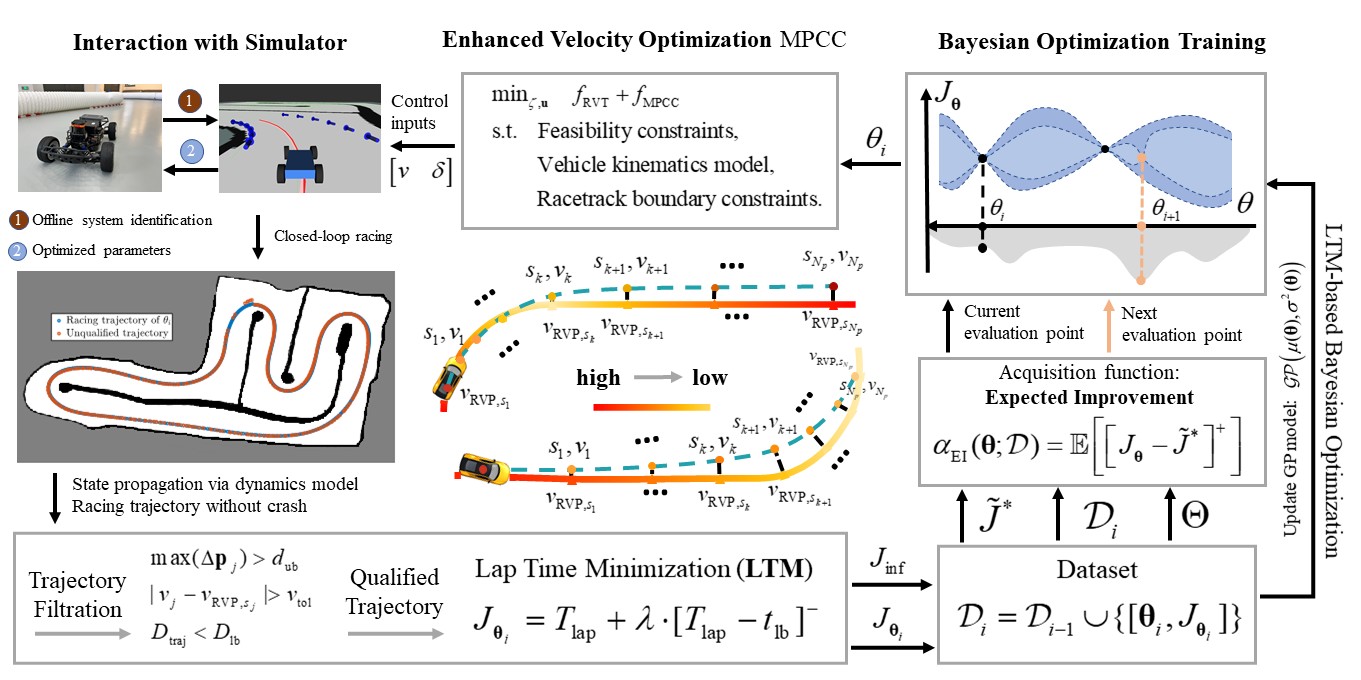
Proposed Framework for LTM-Based BO Auto-Tuning of the Parameters of a new EVO-MPCC Trajectory Planner. The black arrows represent the evaluation process of the current parameter, while the light brown arrows denote the next parameter selected by the acquisition function for evaluation. The closed-loop training terminates at the N_BO iteration.
Motivation
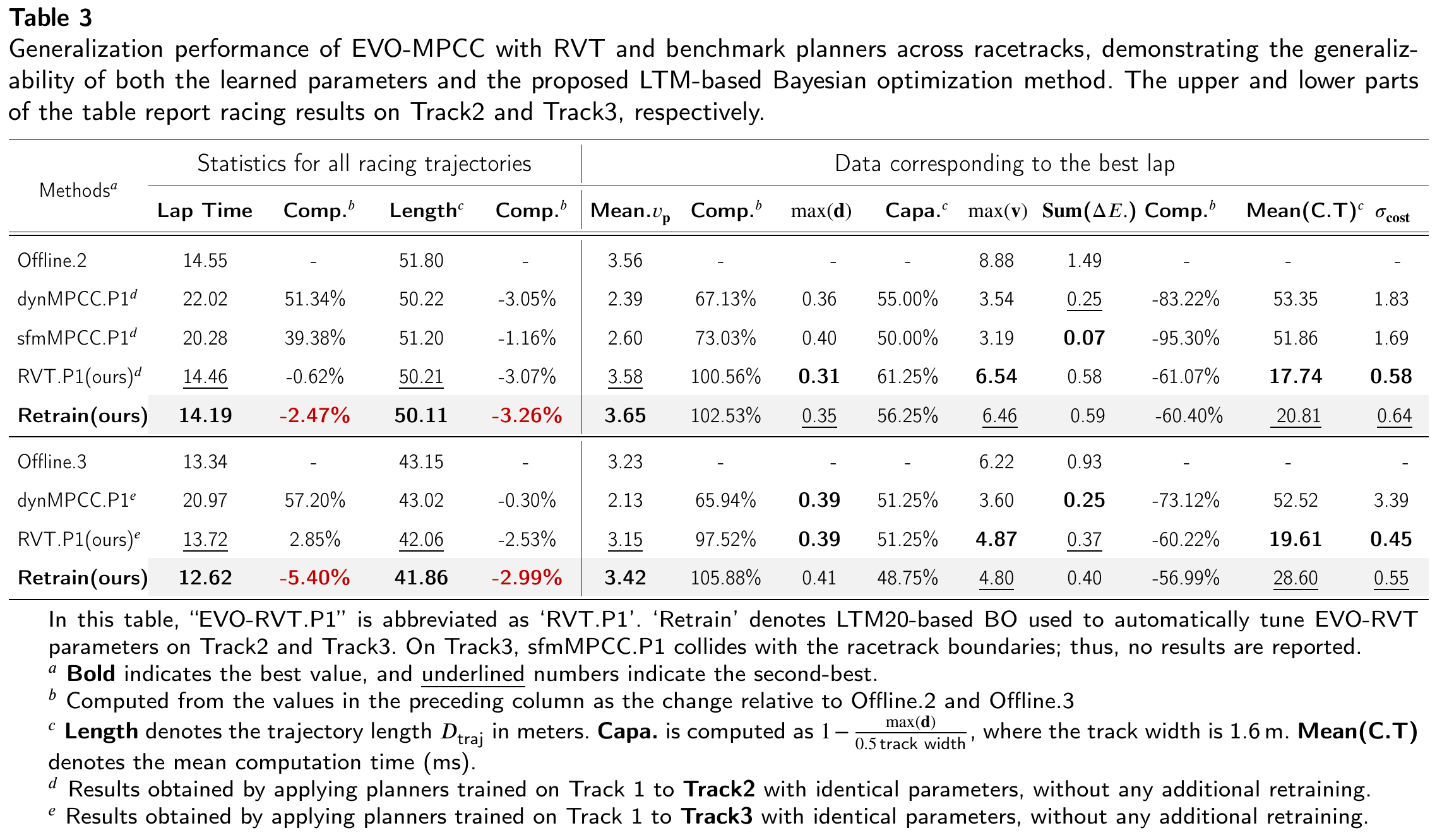
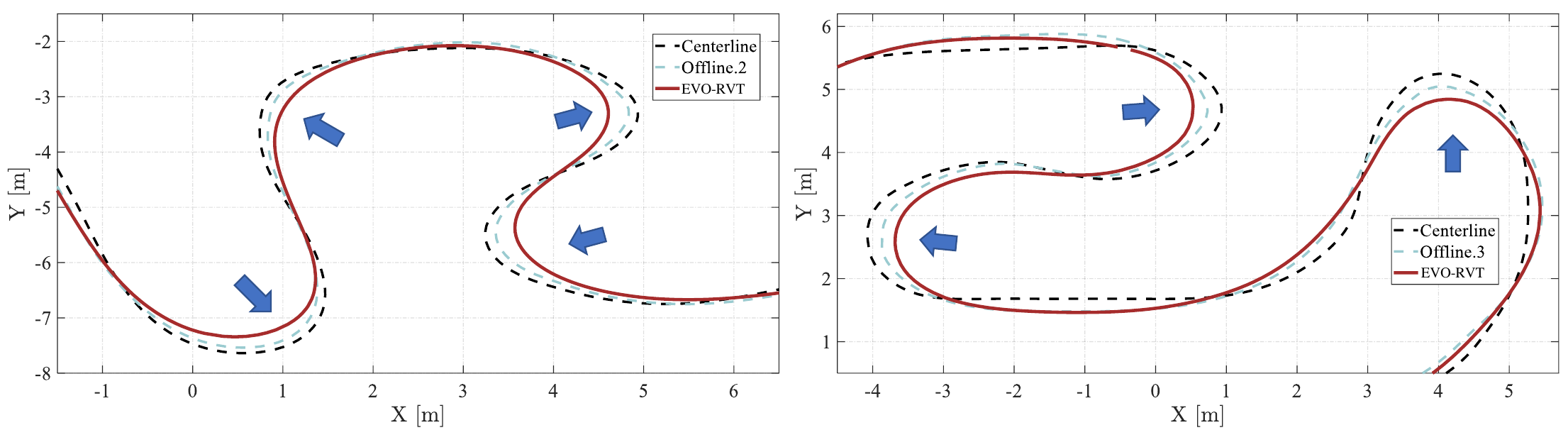
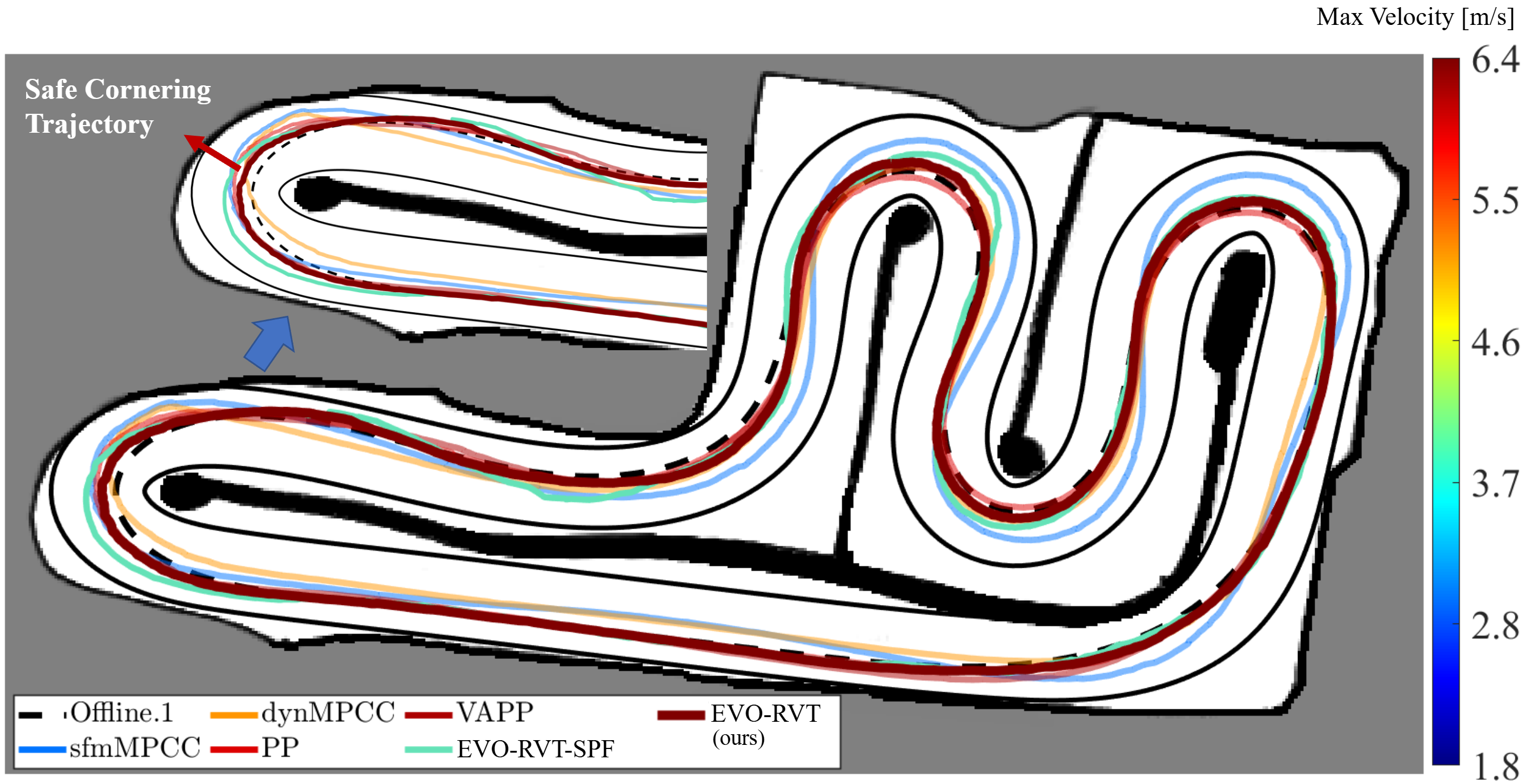
Numerical Simulation Results for Racing and Obstacle Avoidance
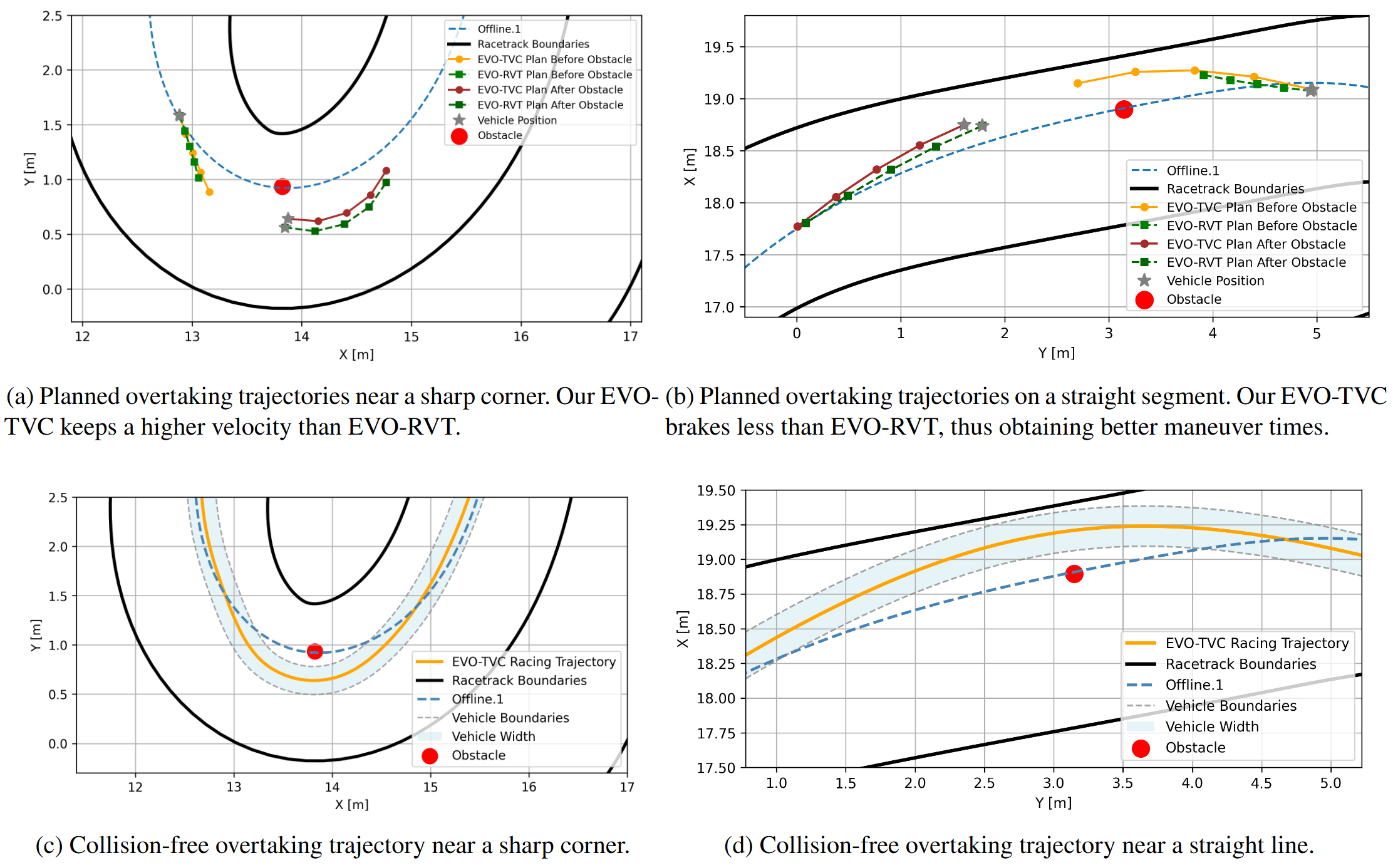
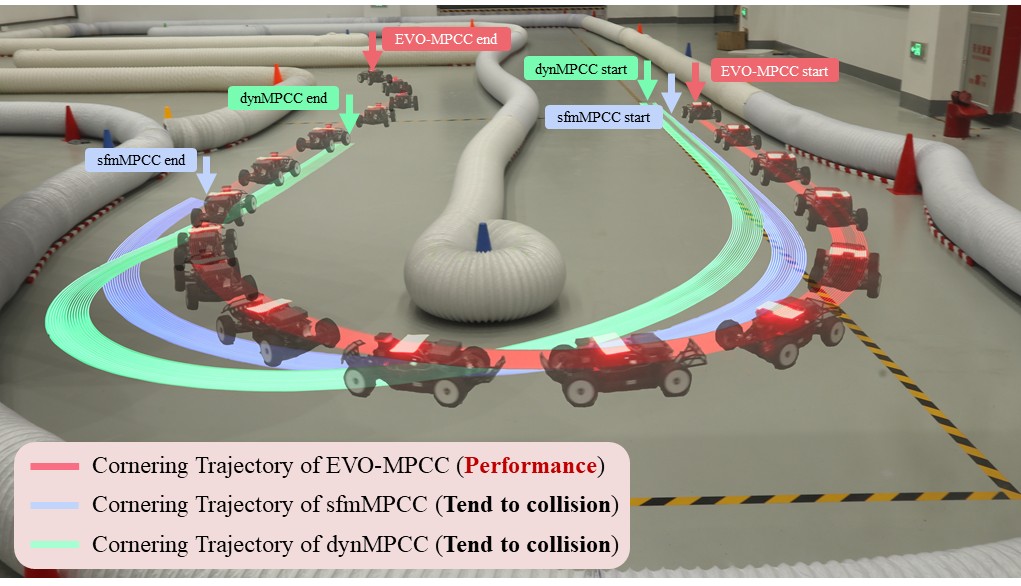
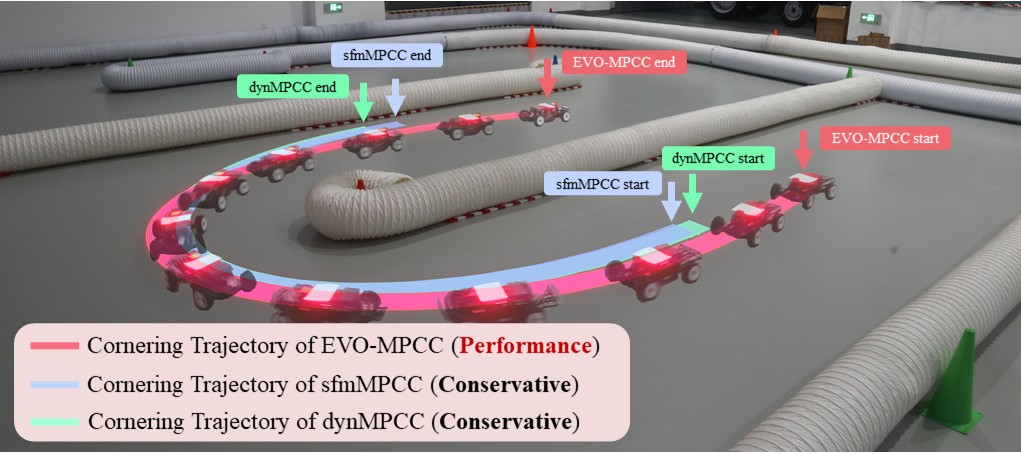
Real-World Validation of Feasibility and Aggressiveness
First Viewpoint
 replay
replay
replay
Conclusion
This paper presents an Enhanced Velocity Optimization MPCC (EVO-MPCC) framework for high-performance autonomous racing. By explicitly integrating velocity optimization into MPCC, the proposed approach effectively balances aggressive racing behavior with stable cornering performance under limited prediction horizons. An LTM-based Bayesian Optimization (BO) module is further introduced to enable efficient and automated parameter tuning. Real-world experiments demonstrate that EVO-RVT consistently achieves a mean projected velocity of 98.23% of the reference performance limit, while maintaining real-time feasibility with an average computation time of only 6.41 ms. In addition, EVO-RVT reliably completes multiple consecutive laps and improves onboard energy efficiency by more than 50% compared to offline-planned trajectories, highlighting its robustness and efficiency in real-world racing scenarios.
The proposed EVO-MPCC framework comprises two complementary formulations targeting different racing tasks. EVO-RVT focuses on high-performance racing in obstacle-free scenarios by continuously optimizing vehicle velocity along the racetrack using a reference velocity profile, allowing the planner to accurately identify appropriate braking points and generate feasible cornering trajectories even with a short prediction horizon. EVO-TVC extends this framework to overtaking scenarios by introducing reference-velocity-based terminal velocity cost together with adaptively weighted collision-avoidance costs, thereby preserving sufficient maneuvering flexibility while ensuring safety. Experimental results show that EVO-TVC achieves a 9.81% reduction in lap time compared to hierarchical overtaking planners, demonstrating the advantages of unified planning-and-control optimization for time-efficient and collision-free overtaking.
BibTeX
To be updated soon.
A brief conference paper only employs reference velocity tracking for racing: A Data-Driven Aggressive Autonomous Racing Framework Utilizing Local Trajectory Planning with Velocity Prediction
A simpler approach uses the racetrack's offline curvature to optimize the velocity profile of the local trajectory: Reduce Lap Time for Autonomous Racing with Curvature-Integrated MPCC Local Trajectory Planning Method